Space Club
Space Club RIT is a branch of Student Activity Cell (SAC) of CIIED RIT.
Established:- 27th June 2017.
Objectives:
- To study and understand the workings of various systems related to the satellite technology and rockets also creates a system to pass on that knowledge to the next generation of students.
- Research and Develop better and cheaper ways of developing a satellite and rocket.
- Collaborate and work with various institutions working in the fields of satellite and rocket technology also offer our service to various scientific institutions.
- Create a culture of research and development in the fields of Satellite and rocket Engineering.
Vision:
"We want to create a culture of fearlessly thinking, designing, and building ideas in the field of space research. Just like space, we will never have any boundaries on thinking, which will lead us toward the great ideas. We will work honestly and morally to bring those ideas into the motion. We want to spread the power of optimism in the community where we serve and we will expand the community day by day."
Mission:
- To study the different sub-system used in satellite and rockets.
- Experimental launching of AMATEUR ROCKETS.
- Developing the rockets with the full proof deployment system.
- To develop our own communication system and build our own ground station to communicate with satellites.
- To design and develop a working satellite model to examine and develop our knowledge.
- To design and develop high-quality components to be used in the satellite.
- To develop a series of model satellites and rockets also keep on improving the performance of the satellite.
- To get research projects from ISRO.
Members list:
| Sr No. | Roll Number | Name | Designation |
| 1 | 1806031 | Lade Kailas Vaijinath | Project Manager |
| 2 | 1808004 | Pranay Jaysing Ghadage | System Engineer |
| 3 | 1806110 | Shardul Milind Mohire | R&D Engineer |
| 4 | 1806098 | Priyanka Ravindra Pawar | Structure and Design Engineer |
| 5 | 1805051 | Manaswi Kiran Patil | Structure and Design Engineer |
| 6 | 1805039 | Shahin Mansur Momin | HR |
| 7 | 1806085 | Vaibhav Digambar Kadam | Technical Advisor |
| 8 | 1906083 | Gourav Guruling Jidage | Member |
| 9 | 1906082 | Siddharth Sanjay Kashid | Member |
| 10 | 1906095 | Pratikraj Mugade | Member |
| 11 | 1906099 | Nihal Umarfaruk Mujawar | Member |
| 12 | 1908033 | Niraj Mahadev Patil | Member |
| 13 | 1906074 | Om Sachin Bhagat | Member |
| 14 | 1905050 | Megha Tukaram Kale | Member |
| 15 | 1906086 | Utkarsh dhondiram desai | Member |
| 16 | 1906041 | Praful Popat Kharat | Member |
| 17 | 1906020 | Aman Mahesh Chavan | Member |
| 18 | 2015039 | Shifa Zehruddin Desai | Member |
| 19 | 1905051 | Dipti Subhash Wagh | member |
| 20 | 1903016 | Shubham Shamrao Shinde | Member |
| 21 | 1903066 | Pradnya Prakash Adake | Member |
Achievements:
- National level Rocketry competition winner at SDNx.
- Rockets at the height of 600m with the deployment system.
- Successful compilation of Balloon satellite with full recovery and successful payload work in collaboration with IISER Bhopal.
- 10 Licensed Radio Operator. (2 General Grade + 8 Restricted Grade) .
- Balloon Satellite and cloud seeding projects are in pipeline.
- MOU signed with IISER Bhopal and IIGM(Indian Institute of Geomagnetism).
Video:
Activities Performed in Academic Year 2022-23
Current On-going Project.
Rocket For an altitude of 3000-4000 ft (1km)
This will primarily serve the purpose of testing vehicle. Testing the systems which will be applied to build rocket of set altitude of 10,000 ft / 3km. Considering the system Recover and Avionics plus motor and structure.
The main goal of this vehicle will be,
- Travel Straight trajectory as much possible
- A full proof recovery concerning safety of payload.
Currently we are done with fabricating most of the major components for the 1km rocket such as’
- Recover System (Prachute’s)
- Motor
- Structure
- Avionics (in-progress)
 |
 |
 |
|
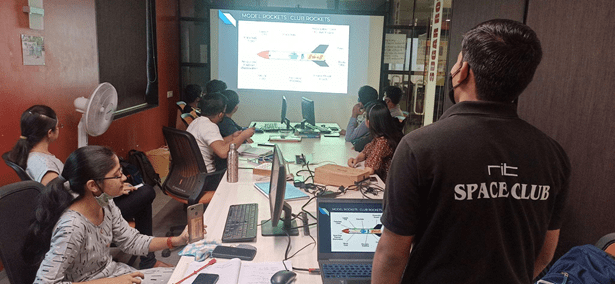
Figure 1: Glimpses of activities performed |
||
K class Motor:-
After testing prototype we scaled up motor size, as required to lift a rocket of 5-8 kg to an altitude of 1km. Considering all it was required to build motor of K class delivering total impulse up to 1500 N.s As shown in figure motor is mounted up side down pos. top most conical shape part is noozle of motor, and the shining tube is aluminium casing Alternative to spring based system which uses springs displacement to calculate the force, this time we build an static test stand incurring load cell. Which was connected with ESP microntroller for data acquisition and then transferring it to near by laptop, which used to plot an graph based on result’s. During test because of manufacturing defect motor casing was ruptured imparting heavy load on load cell eventually damaging it.After this one more test was conducted on the same spring based system considering vulnerability of load cell.2nd test was conducted successfully.
 |
 |
|
Figure 2- Class motor mounted over Load Cell based static test stand. |
Figure 3- K class motor test |
Avionics:
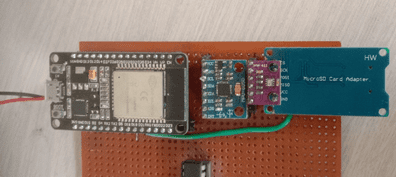
In the current Rocket avionics system main role is to collect the flight data of rocket, continuous monitoring of altitude as of deployment at correct altitude. Compared to old avionic system, which was based on pic micro controller, didn’t had sensors which would monitor the pressure gradient and calculate it in terms of altitude, also it didn’t have onboard sensors like accelerometer and gyroscope the combination of which resembles the IMU of rocket” Inertial Measurement Unit”. In earlier model recovery was timer based which used to start once programed interrupt signal is received, the time to flight was calculated based on simulated result and was feed to controller through program, on the end of which deployment takes place. The problem with this system is if the rocket doesn’t go according to set time, recovery will either be delayed or happen earlier than it is supposed to. To solve this issue, current system utilizes all three on board sensors to execute deployment on time. Timer system is also kept as a backup to all the system. Refering to below figure, which shows PCB of 1Km rocket. The 1 st big chipset from the left is microcontroller, 2nd
is accelerometer, 3rd BMP sensors and a micro-SD card module at end which will interface an memory card storing the collected data.
|
|
Fig.4 Avionics System |
Space Club Working model (2021)
In the space club, we had a division called Rocket and Satellite. This was from 2017-18. Where both divisions almost have the same structure of working and subsystems but different projects. In mid-year of 2018 upper management took a decision to merge both the divisions to share knowledge and expertise in subsequent subsystems. After this change, the club was able to attend the new heights in upcoming projects. Now in the year 2021, the club still works under the same model. There was always an addition of new members through college from each new batch.
The first-year batch works on their basics to join the subsystems, the second and third-year batch works on the projects and last year batch works on the management of projects and Leading all activity. This model ensures that each year there are sufficient members to work on projects and to maintain the club activities. Due to this model, we are able to transfer all the important details to the next batch easily. As part of activities added some non-technical and technical sessions for the development of club members in all directions.
The Year of 2021:
As per the literature survey that was done in the previous year we started working on actual models of rockets for 3km height. This all in focus to make an attempt to achieve the goal of cloud seeding. We completed our on-paper survey and designing of rockets for the cloud seeding project. We need some special permission to launch the rockets above 1km. There is also a need for some initial capital to make models and testing. Also started studying movable fins and hybrid propulsion study for the rocket.
Static Test of Motor:
For understanding the basic concept behind rocket propulsion we have taken the static test of the rocket motor. From this activity, they got knowledge about how to prepare rocket fuel and the basic concepts behind it.


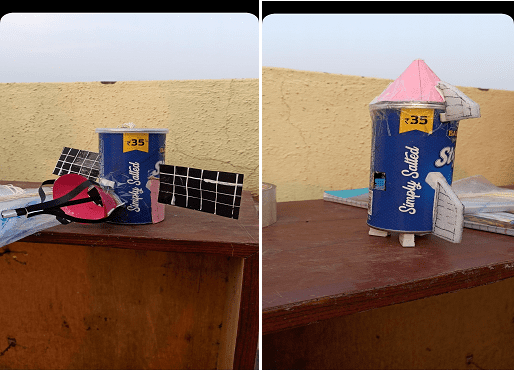
Can Sat Activity:
We are able to perform the successful activity of can sat for the SY students. A Can Sat is a type of sounding rocket payload used to teach space technology. It is similar to the technology used in miniaturized satellites. No Can Sat has ever left the atmosphere, nor orbited the earth.

Weekly Sessions:
Weekly sessions are designed in such a way that it will help all members to improve their soft skills like presentation, speaking in front of a crowd and help them building confidence themselves. In weekly sessions, one of the members of the club prepares scientific, technical, or nontechnical trending topics. Then the topics were explained by him/her to other club members.
In nontechnical sessions, all club members discuss current affairs which will definitely help them to enhance the skills required for group discussion in interviews.
Topics:
- Rocket Science: Club Work to ISRO
- Neuralink
- Time Travel
- Open Rocket
- Wormhole
- Farm Bills
- Women empowerment
Whiteboard Activity:
Whiteboard activity is designed to discuss topics that are not generally discussed but play a vital role in our day-to-day life. Where we let everyone put their own views. And at the end of the day, we discuss their views. Some of the questions we discussed as below:
- What is god?
- What is engineering?
- What is the mind?
- What is luck?
- What is love?
- What is a team?
- What is life?
Orientation program:
In the orientation program, we gave a brief introduction of the club to first-year students and how to work as a team. Also share information about the recruitment process and how the club will benefit them.

Future Plans:
- Rebuilding standard load cell.
- Standardization of Rocket for 1 Km height(EPLV-I)
- Real-Time tracking of rocket flight
- Rocket for reaching 3Km height(EPLV-II)
- Testing model of recovery in EPLV-I as a payload
- Making model of movable fins and gimbaled nozzle
- Studying the concept of hybrid propulsion.